
|
| |||
|
Разделы
Главная
Сапромат
Моделирование
Взаимодействие
Методы
Инновации
Индукция
Исследования
Факторизация
Частоты
Популярное
Как составляется проект слаботочных сетей?
Как защитить объект?
Слаботочные системы в проекте «Умный дом»
Какой дом надежнее: каркасный или брусовой?
Как правильно создавать слаботочные системы?
Что такое энергоэффективные дома?
|
Главная » Погрешность Погрешность позиционирования орбитальных потребителей спутниковых радионавигационных Афраймович Э.Л. (afra@iszf.irk.ru), Татаринов П.В. Институт солнечно-земной физики СО РАН 1. Введение Развитие космических систем и технологий расширяет круг исследовательских и прикладных задач, решаемых такими системами. При этом требования к навигационному обеспечению орбитальных объектов, входящих в состав различных космических систем, постоянно возрастают. Применение спутниковых радионавигационных систем (СРНС) второго поколения [1] для решения задач навигации орбитальных объектов позволяет значительно повысить точность определения координат и параметров движения таких объектов. Одной из важнейших особенностей навигационных определений орбитальных объектов с помощью СРНС является возможность непрерывных многопараметрических измерений, позволяющих в каждый момент времени определять положение и скорость потребителя с высокой степенью точности по сравнению с наземными командно-измерительными комплексами (КИК) [1]. Однако качество функционирования СРНС в значительной мере зависит от состояния околоземного космического пространства (ОКП). В работе [2] показано, что во время геомагнитных возмущений в ОКП происходит ухудшение качества функционирования СРНС и, как следствие, снижение точности позиционирования и появление сбоев в определении координат наземных потребителей навигационной информации. В последнее время появились работы по исследованию флуктуаций амплитуды и фазы дециметровых радиоволн на трассах спутник - спутник [3]. Эти флуктуации приводят к возникновению дополнительной погрешности определения координат потребителя и в наихудших условиях способны вызвать срывы сопровождения сигналов одного или нескольких навигационных спутников, и, как следствие, сбой в работе системы [4]. Однако с точки зрения орбитального потребителя СРНС значительно больший интерес представляют исследования качества функционирования СРНС как системы определения местоположения. При этом актуальным становится вопрос исследования влияния среды распространения навигационных сигналов на точность позиционирования орбитальных потребителей СРНС. 2. Методика исследования погрешности позиционирования Авторами разработана методика оценки погрешности позиционирования орбитальных потребителей СРНС. Суть методики заключается в сравнении координат, восстановленных из измерений псевдодальностей между навигационными спутниками GPS и орбитальным потребителем, с координатами данного объекта, полученными с помощью лазерных станций слежения и высокоточных акселерометров [5]. В качестве орбитального объекта для эксперимента был выбран низкоорбитальный спутник CHAMP [5] по следующим причинам: - на спутнике установлен лазерный уголковый отражатель и регулярно проводятся измерения сетью наземных станций International Laser Range Service (ILRS) [6], что позволяет получить координаты объекта с высокой степенью точности; - в состав бортового оборудования спутника входит двухчастотная аппаратура потребителя GPS, на основании данных которой формируются суточные файлы в формате RINEX [7], содержащие результаты кодовых (p1 и p2) и фазовых (l1 и l2) измерений псевдодальностей до навигационных спутников. Параметры орбиты спутника: наклонение i = 87,30, высота h ~ 400 км, период обращения t ~ 93,55 мин. В качестве исходных данных были использованы RINEX - файлы приёмника CHAMP, доступные в сети Интернет [8], навигационные RINEX - файлы для спутников GPS [9], а также эталонные координаты, предоставляемые Центром геофизических исследований (Потсдам, Германия) [10]. Для выполнения исследований авторами разработан программный комплекс RedLEO, описание которого приведено в [11]. На первом этапе проведения исследований осуществлялось восстановление координат спутника CHAMP на основе измеренных значений псевдодальностей, содержащихся в RINEX - файлах, с помощью программного продукта TEQC, представленного разработчиками в Интернет по адресу: http: unavco.ucav.edu/data support/software/teqc/ teqc.html и модернизированного для удобства проведения эксперимента. На втором этапе исследований производилось вычисление абсолютных погрешностей позиционирования по соответствующим координатам с интервалом между отсчётами, равным 30 секунд: AX, = Xt -X,; AY, = Yt -Ул; AZt = Z, -Z , (1) где xi, yi, zi - координаты спутника, восстановленные с помощью TEQC; xi0, yi0, zi0 -текущие высокоточные прямоугольные геоцентрические координаты спутника; i -номер текущего отсчёта. Далее вычислялась текущая пространственная абсолютная погрешность А(£) определения координат спутника A(t.) = ,JAX2 + AY.2 + AZ2 . (2) 3. Результаты исследования и обсуждение С помощью вышеописанной методики была проведена обработка данных за 356 суток с 1 января по 31 декабря 2003 г. На рис. 1 в качестве примера представлена динамика погрешности позиционирования A(t), [м] (сплошная чёрная линия) и изменение широты спутника CHAMP (p(i), [0] (прерывистая серая линия) за 11.10.2003 г. Следует отметить, что подобная динамика характерна для всего массива обработанных данных. Из рис. 1 видно, что максимумы погрешности по времени совпадают с пересечением траектории спутника с экваториальной плоскостью, а минимумы - при прохождении спутника через полярные области. Характер изменения погрешности позволяет сделать вывод о наличии в ней систематической и флуктуационной составляющей. Наиболее вероятными причинами появления систематической составляющей могут быть: ухудшение наблюдаемости потребителя по одной из координат, которое связано с отсутствием изменения данной координаты в течение некоторого времени движения [12]; недостаточно полный учёт гравитационного потенциала Земли в уравнениях возмущённого движения спутников СРНС при определении и прогнозировании их орбит, поскольку в [1, 13, 14 и 15] говорится только об учёте составляющей, характеризующей полярное сжатие Земли. A(t), м p(t),° 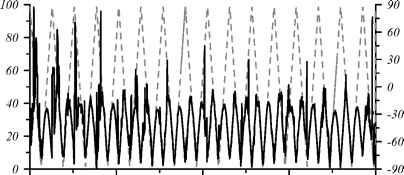 0:00 6:00 12:00 18:00 0:00 t (UT), ч Рис.1. Динамика погрешности позиционирования и изменение широты спутника CHAMP 11.10.2003 г. 3.1. Определение систематической составляющей погрешности Для определения аналитических выражений систематической составляющей погрешности позиционирования a(t) были проведены исследования зависимостей ошибок Ах/, Af/, azi от геодезических координат подспутниковой точки (ф, x), где x -долгота подспутниковой точки. На рис. 2 приведены суточные зависимости абсолютных погрешностей позиционирования по координатам x и y от долготы подспутниковой точки за 11.10.2003 г. Авторами было эмпирически установлено, что огибающие зависимостей axi(x) и Ayj(X) являются периодическими функциями, которые с удовлетворительной точностью могут быть аппроксимированы гармоническим законом: AXt (Л) = AX maXsm(A + n); AYf (Л) = AYmax cos(l), (3) где axmax = aymax = 40 м - максимальные значения систематической составляющей погрешностей по соответствующим координатам, установленные экспериментальным В свою очередь широтные зависимости Ax/(>) и Ay/(>) (рис. 3) можно аппроксимировать набором парабол с различными коэффициентами кривизны ветвей kxx) и ky(x), зависящими от долготы подспутниковой точки: AXt {(р) = -кх (А)<р2 +AXt (Л); AY; (р) = -к¥ (Л)р2 + AYt (Л), (4) Было установлено, что коэффициенты кх(х) и ку(х) также изменяются по гармоническому закону, уменьшаясь от максимальных значений при максимальных Ax(x) и Ay(x) соответственно до нуля при Ax(i), Ay(x) - 0. Выражения для коэффициентов кх(1) и ку(Я) можно записать в виде: kx W = kx maxsin( + ); где кх = ку = 0,005 экспериментально. максимальные значения коэффициентов, установленные А Б AX м 80 -80 --I-I--I-I--I-I--I-I- -180 -90 0 90 180 к  AY , м 80 -80 --I-I--I-I--I-I--I-I- -180 -90 0 90 180 к°  Рис.2. Зависимости абсолютных погрешностей AXi (панель А) и AYi (панель Б) от долготы подспутниковой точки. AX м 80 40 А 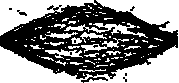 -80 I I I I I I I I I I I I -90 -60 -30 0 30 60 90 ф,1 Б AY м 80 -80 -f 1 1 I 1 1 I 1 1 I 1 1 I 1 1 I 1 1 I -90 -60 -30 0 30 60 90 Ф, ( Рис.3. Зависимости абсолютных погрешностей AXi (панель А) и AYi (панель Б) от широты подспутниковой точки. Окончательные выражения для систематической составляющей погрешностей Axic Afic запишутся в виде: AX,C = -kX sin(A + п)ф2 + AXmax sin(A + n); AY; = - ky cos(A>2 + AYmax cos(A). На рис. 4 представлена зависимость погрешности az от широты и долготы подспутниковой точки. Как видно из рис.4, погрешность AZ/ не имеет ярко выраженной долготной зависимости. Широтную же зависимость azi((p) можно аппроксимировать следующим выражением: AZ м 100 50 0 -50 -100 А  . I I I I I I -90 -60 -30 0 30 60 90 р,0 Б AZ м 100 50 -50 -100 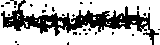 > 1--I- - -I- --I- --I -180 -90 0 90 180 Л,0 Рис.4. Зависимость погрешности aZ от широты (панель А) и долготы (панель Б) подспутниковой точки. AZj = AZ; = AZ max sin(), (7) где azmax = 10 м - максимальное значение систематической составляющей погрешности по координате z, установленное экспериментально. Для того, чтобы выделить флуктуационную составляющую из погрешностей, описываемых выражением (1), необходимо вычесть соответствующие систематические составляющие (6) и (7). 3.2. Исследование флуктуационной составляющей погрешности На рис. 5 представлена динамика погрешности позиционирования спутника CHAMP до (панель А) и после (панель Б) устранения систематической составляющей. Флуктуационная составляющая обусловлена, в основном, влиянием среды ОКП на распространение сигналов от навигационных спутников. Более подробное исследование природы флуктуационной составляющей будет проведено в дальнейшей работе. Для оценки влияния ОКП была проведена статистическая обработка погрешности позиционирования спутника CHAMP за период с 1 января по 31 декабря 2003 г в различных геофизических условиях. В качестве магнитоспокойных было выбрано 3 дня, когда значения планетарного индекса геомагнитной активности kp на любом трёхчасовом интервале не превышало 2, а в качестве магнитовозмущённых - 5 дней, когда kp был равен или превышал значения 8. На рис. 6 в виде гистограмм представлено статистическое распределение относительных частот погрешности позиционирования спутника CHAMP в диапазоне от 0 до 80 м в магнитоспокойных (чёрная линия со штрихами) и магнитовозмущённых условиях (серая линия). А A(t), м 100 80 60 40 20 А 0:00 A(t), м 100 80 60 40 20 6:00 12:00 Б 18:00 0:00 t (UT), ч 0:00 6:00 12:00 18:00 0:00 t(UT), ч Рис.5. Динамика погрешности позиционирования спутника CHAMP 11.10.2003 г. до (панель А) и после (панель Б) устранения систематической составляющей. P(A) 0.8 0 10 20 30 40 50 60 70 80 A м Рис.6. Гистограммы погрешности позиционирования спутника CHAMP в различных геофизических условиях после устранения систематической составляющей. Из рис. 6 можно сделать вывод, что после устранения систематической составляющей наиболее вероятная ошибка определения местоположения спутника CHAMP не превышает 10 м. Следовательно, применение СРНС для решения задач навигации орбитальных объектов удовлетворяет требованиям, предъявляемым к навигационному обеспечению объектов данного класса [14]. Однако в условиях геомагнитных возмущений вероятность появления погрешности позиционирования, превышающей 30 м, в 1,5 раза выше, чем в спокойных условиях. Эта работа выполнена при поддержке Российского фонда фундаментальных исследований (гранты 03-05-64627, 03-05-64100), а также гранта N НШ-272.2003.5 государственной поддержки ведущих научных школ Российской Федерации. Авторы благодарят Центр геофизических исследований (Потсдам, Германия) и профессора К. Рейгбера (Prof. Dr. Christoph Reigber) за данные спутника CHAMP. Литература 1. Дмитриев П.П., Иванцевич Н.В., Шебшаевич В.С. Сетевые спутниковые радионавигационные системы. / Под ред. П.П. Дмитриева, В.С. Шебшаевича - М.: Радио и связь, 1982. - 272 с. 2. Afraimovich E.L., Demyanov V.V., Kondakova T.N. Degradation of performance of the navigation GPS system in geomagnetically disturbed conditions GPS Solutions. 2003. V.7. N 2. P. 109-119. 3. Викерт Й., Яковлев О.И., Павельев А.Г., Матюгов С.С., Самознаев Л.Н., Ануфриев В. А. Ионосферные флуктуации дециметровых радиоволн на трассах спутник-спутник Радиотехника и электроника. 2004. Т.49. №10. С. 1184-1191. 4. Afraimovich E.L., Lesyuta O.S., Ushakov Voeykov S.V. Geomagnetic storms and the occurrence of phase slips in the reception of GPS signals Annals of Geophysics. 2002. V. 45. N 1. P. 55-71. 5. http: www.gfz-potsdam.de/champ/ 6. http: ilrs.gsfc.nasa.gov/about ilrs/index.html 7. Gurtner, W. RINEX: The Receiver Independent Exchange Format Version 2, 1993, http: igscb.jpl.nasa.gov/igscb/data/format/rinex2.txt. 8. ftp: cddisa.gsfc.nasa.gov/pub/gps/ leodata/CHAMP/ 9. ftp: lox.ucsd.edu/pub/nav 10. http: isdc.gfz-potsdam.de/champ/ 11. Афраймович Э.Л., Татаринов П.В. Исследование погрешностей позиционирования орбитальных потребителей спутниковых радионавигационных систем. Сб. науч. тр. Современные проблемы радиоэлектроники , Красноярск, 2005. С. 169 - 172. 12. Карапетян Р. М. Алгоритмы оценки качества и синтеза линейных систем управления. - Рига: ЛРП ВН. ОМ, 1989. - 52 с. 13. Анучин О.Н., Комарова И.Э., Порфирьев Л.Ф. Бортовые системы навигации и ориентации искусственных спутников Земли. - СПб.: ГНЦ РФ ЦНИИ Электроприбор , 2004.- 326 с. 14. Глобальная спутниковая радионавигационная система ГЛОНАСС. / Под ред. В. А. Болдина, А.И. Перова, В.Н. Харисова. - М.: ИПРЖР, 1998. - 400 с. 15. Иванов Н. М., Лысенко Л. Н. Баллистика и навигация космических аппаратов. -М.: Дрофа, 2004. - 544 с. |
|
| |||