
|
| |||
|
Разделы
Главная
Сапромат
Моделирование
Взаимодействие
Методы
Инновации
Индукция
Исследования
Факторизация
Частоты
Популярное
Как составляется проект слаботочных сетей?
Как защитить объект?
Слаботочные системы в проекте «Умный дом»
Какой дом надежнее: каркасный или брусовой?
Как правильно создавать слаботочные системы?
Что такое энергоэффективные дома?
|
Главная » ANSYS 1 ... 33 34 35 36 37 38 39 ... 64 Таблица 2.78. Описание расчетных данных элемента PLANE183 (продолжение)
2.10.79. МPC 184 - элемент многоточечных связей: жесткая связь, жесткая балка, ползун, сферический шарнир, цилиндрический шарнир, шарнир Гука Описание элемента Элемент МРС184 включает общий класс многоточечных элементов связей, которые осуществляют кинематические ограничения, используя множители Лагранжа. Элементы классифицируются в качестве элементов ограничений и элементов связей. Эти элементы могут использоваться в ситуациях, требующих кинематических ограничений определенного типа, которые и прикладываются данными элементами. Связи могут являться простыми, как, например, равные перемещения в шарнире, а могут иметь и более сложное представление, как, например, моделирование включенных в модель жестких тел или кинематических связей, которые передают движение между деформируемыми телами некоторым образом. Например, модель структура может состоять из ряда жестких тел и некоторых движущихся частей, связанных вместе связями, передающими вращение или имеющими скольжение. Жесткие части модели могут моделироваться элементами МРС184 в форме стержней или балок, в то время как движущиеся части модели могут быть связаны посредством элемента МРС184 в форме ползуна, сферического, цилиндрического шарниров или шарниром Гука. Поскольку данные элементы формируются на основе множителей Лагранжа, для элемента могут вычисляться и выводиться усилия и моменты, действующие в связях. Тип используемой связи зависит от потребностей применения. 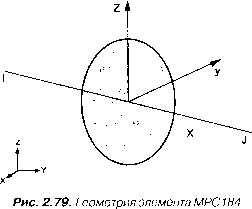 Элементы ограничений Если иное не указано, по умолчанию для элемента в трехмерном (3D) пространстве используется значение признака KEYOPT(2) - 0, если такое применимо. Элементы стержня или балки Элемент МРС184 может использоваться для моделирования жесткой связи между двумя деформируемыми телами или в качестве жесткого (недеформируемого) компонента, используемого для передачи усилий и моментов, Элемент может использоваться в задачах, которые используют тепловое расширение иных жестких структур. При значении признака KEYOPT(l) = 0 (и по умолчанию) элемент является жесткой связью между двумя уздами й имеет три степени свободы в каждом узле (только осевые перемещения). При KEYOPT(l) = 1 элемент является жесткой связью между двумя узлами и имеет шесть степеней свободы в каждом узле (перемещения и повороты в направлениях X, Y и Z). Данный элемент пригоден для линейных расчетов и нелинейных задач с большими поворотами и (или) большими деформациями. Признак KEYOPT(l) - 3 предназначен для создания элемента ползуна с тремя узлами. Трехмерный (3D) ползун (KEYOPT(2) = 0) имеет три степени свободы в узле (перемещения в направлениях X, Y и Z). Двухмерный (2D) ползун (KEYOPT(2) = 1) имеет две степени свободы в узле (перемещения в направлениях X и Y). Элемент ползуна накладывает кинематическое ограничение так, что служебный узел (К) всегда должен лежать на линии, соединяющей два других управляющих узла (I и J). Узел К должен скользить вдоль линии, соединяющей узлы I и J. Сферический шарнир Признак KEYOPT(l) = 5 предназначен для создания элемента сферического шарнира. Два его узла должны совпадать. Трехмерный (3D) элемент сферического шарнира (KEYOPT(2) = 0) имеет три степени свободы в каждом узле (перемещения в направлениях X, Y и Z); двухмерный (2D) элемент сферического шарнира (KEYOPT(2) = 1) имеет две степени свободы в каждом узле (перемещения в направлениях X и Y). Элемент сферического шарнира прикладывает кинематическое ограничение так, что перемещения в двух узлах, формирующих элемент, являются идентичными. Степени свобод в виде поворотов, если таковые имеются, ограничений не имеют. Примечание. Идентичные перемещения в двух узлах также могут предписываться при помощи команд СЕ или СР. В этом случае степени свобод, имеющие ограничения, удаляются. Однако для элементов сферических шарниров связи наложены посредством множителей Лагранжа, что позволяет вычислять усилия, действующие в связях. Приложение связей в форме перемещений при помощи команд СЕ или CP всегда более эффективно и должно использоваться вместо элементов сферических шарниров МРС184 всякий раз, когда это возможно. Элементы шарниров Процедуры численного исследования конструкций часто требуют учета связей, имеющихся между двумя деталями (частями модели). Данные соединения, или связи, возможно, порождают необходимость в простых кинематических ограничениях, таких как равные перемещения двух деталей, входящих в соединение, или в более сложных кинематических ограничениях, которые учитывают передачу движения между двумя деформируемыми телами. Это сложное соединение может также включать определенный контрольный механизм, например ограничитель или упор, а также компоненты, передающие относительное движение между этими двумя телами. Во многих случаях это соединение может также включать свойства жесткости, демпфирования или трения компонентов, передающих относительное перемещение между этими двумя телами. Цилиндрический шарнир (вращательное сочленение) и шарнир Гука широко используются в автомобильной промышленности, в робототехнике, биоинженерии и иных отраслях. Данные элементы определяются двумя узлами. Далее, в зависимости от шарнира, который должен быть создан, в определенной форме накладываются кинематические ограничения, которые определяют относительное движение между этими двумя узлами. Эти кинематические ограничения создаются при помощи множителей Лагранжа. Элемент шарнира имеет шесть степеней свободы в каждом узле, определяющих шесть компонентов относительного движения: три относительных перемещения и три относительных поворота. Эти шесть компонентов относительного движения представляют первичный интерес при моделировании, которое использует элементы шарниров. Некоторые Из этих компонентов могут быть ограничены кинематическими связями, соответствующими типу элемента шарнира, в то время как иные компоненты ограничений не имеют. При использовании шарнира Гука и цилиндрического шарнира два узла должны совпадать, и, таким образом, относительные перемещения являются нулевыми. Для цилиндрического шарнира не имеет ограничений только один компонент относительного движения, а именно поворот, в то время как для шарнира Гука имеются два таких компонента. Возможности данных элементов включают отдельные контрольные возможности, такие как остановки, запирание и условия нагрузок и граничных условий, которые могут быть приложены к компонентам относительного движения между двумя узлами элемента. Например, в цилиндрическом шарнире остановки могут быть определены для вращения вокруг оси. Таким образом, вращение вокруг оси ограничивается определенным диапазоном углов поворота. Перемещение или граничные условия в форме усилий могут быть приложены к компонентам относительного движения между этими двумя узлами, учитывающими привод для шарнира. Усилие, возбуждающее перемещение, или перемещение являются результатом действия исполнительных механизмов, таких как электрическая или гидравлическая система, приводящая данное соединение. Свойства линейной жесткости и демпфирования могут указываться для компонентов относительного движения, не имеющих ограничений. Свойства линейной жесткости и демпфирования при необходимости могут зависеть от температуры. В дополнение к существующим опциям вывода информации, имеющимся в комплексе ANSYS, расчетные данные, связанные с компонентами относительного движения, для данных элементов вычисляются. Данные элементы пригодны для линейных расчетов и нелинейных задач с большими поворотами и (или) большими деформациями. Цилиндрический шарнир При KEYOPT(l) = 6 элемент является цилиндрическим шарниром с двумя узлами. Два узла, образующих элемент, должны иметь идентичные координаты. Элемент цилиндрического шарнира МРС184 имеет только одну степень свободы, которая является относительным поворотом относительно оси вращения. Возможности данного элемента включают контрольную возможность, то есть остановку и запирание действующей степени свободы. Граничные условия поворота могут также быть наложены на имеющийся компонент относительного движения в форме вращения. Для поворота вокруг оси вращения дополнительно можно указывать жесткость и демпфирование. Иным элементом цилиндрического шарнира в комплексе ANSYS является элемент COMBIN7. Элемент COMBIN7 позволяет управлять податливостью связи, трением, демпфированием и некоторыми возможностями контроля. Локальная система координат фиксирована и перемещается вместе с элементом, что позволяет использовать данный элемент в задачах с большими перемещениями. Элемент цилиндрического шарнира МРС184 прикладывает кинематические ограничения так, что узлы, формирующие элемент, имеют равные перемещения. Кроме того, относительно оси шарнира допускается только относительное вращение, в то время как повороты относительно двух других направлений запрещены. Шарнир Тука При KEYOPT(l) = 7 элемент является шарниром Гука с двумя узлами. Два узла, образующих элемент, должны иметь идентичные координаты. Элемент шарнира Гука МРС184 имеет две степени свободы относительных поворотов. Возможности данного элемента включают контрольную возможность, то есть остановку и запирание действующих степеней свобод. Граничные условия поворота могут также быть наложены на имеющиеся компоненты относительного движения в форме вращения (поворота). Для поворотов дополнительно можно указывать жесткость и демпфирование. Исходные данные элемента Исходные данные изменяются в зависимости от типа связи или соединения, моделируемого элементом МРС184. Исходные данные связей Стержни и балки Геометрия, расположение узлов и система координат элемента показаны на рис. 2.79. Элемент определяется двумя узлами. Ось X системы координат элемента направлена от узла I к узлу J. Площадь поперечного сечения элемента считается равной единице. Комплекс ANSYS выбирает систему координат поперечного сечения автоматически; описание используемого метода см. в описании элемента ВЕАМ4. Система координат поперечного сечения пригодна только для вывода значений расчетных изгибающих моментов, если элемент используется в качестве абсолютно жесткой балки. Поскольку элемент моделирует жесткую связь или абсолютно недеформируе-мую деталь, свойства жесткости материала указывать не требуется. При необходимости учета температурных эффектов коэффициент температурного расширения должен быть указан. Если масса жесткого элемента должна учитываться в расчете, плотность должна быть указана. Если плотность указана, комплекс ANSYS для элемента создает концентрированную матрицу масс. Элемент поддерживает опции рождения и смерти при помощи команд EALIVE и EKILL. Геометрия, расположение узлов и система координат элемента показаны на рис. 2.79.1. Элемент определяется тремя узлами (I, J и К). Предполагается, что узел I исходно лежит на линии, соединяющей узлы J и К. . Для данного элемента свойства жесткости материала указывать не требуется. В версии 9.0 элемент не поддерживает опции рождения и смерти. к 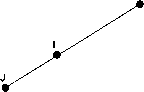 Рис. 2.79.1. ЭлементМРС184 в форме ползуна Сферический шарнир Геометрия и расположение узлов элемента показаны на рис. 2.79.2. Элемент определяется двумя узлами. Эти два узла (I и J) исходно должны иметь идентичные координаты. Для данного элемента свойства жесткости материала указывать не требуется. В версии 9.0 элемент не поддерживает опции рождения и смерти. 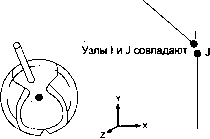 Рис. 2.79.2. Элемент МРС 184 в форме сферического шарнира Исходные данные шарниров Некоторые требования к исходным данным одинаковы для всех типов элемента связи МРС184. Любые требования для отдельных вариантов элементов связей приводятся в соответствующих разделах описания. Определение поперечного сечения Каждый элемент связи должен иметь ассоциированное с ним поперечное сечение. Для указания типа поперечного сечения применяется команда SECTYPE. Локальные системы координат и требуемая для них ориентация зависят от типа связи. Требования к системам координат элементов различного вида приводятся в соответствующих разделах описания элемента. Как правило, локальная система координат всегда определяется для первого узла элемента связи. Локальная система координат для второго узла может являться необязательной и, если не указывается, обычно принимается тождественной системе координат для первого узла. Компоненты относительного движения в форме поворотов между двумя узлами элементов связей количественно указываются в форме узлов Бриана (Bryant) или Кардана (Cardan), которые определяются на основе этих систем координат. Признаки остановки движения, или пределы перемещения Признаки остановки движения, или пределы перемещения, могут быть приложены к наличным компонентам относительного перемещения между двумя узлами элемента связи. Остановка движения, или пределы, в сущности ограничивают значения пс имеющих ограничений степеней свобод в пределах некоторого диапазона. Минимальные и максимальные значения указываются командой SECSTOP. Замыкание Замыкание, или пределы запирания, может также быть приложено к наличным компонентам относительного перемещения между двумя узлами элемента связи. Запирание используется в основном в связях механизмов для замораживания шарнира в требуемой конфигурации в ходе деформирования. После активизации запирания для указанного компонента относительного перемещения этот компонент останется запертым в ходе последующего расчета. Для указания пределов запирания применяется команда SECLOCK. Свойства материалов Свойства жесткости и демпфирования Свойства линейных и нелинейных жесткости и демпфирования могут быть связаны со свободными или не имеющими ограничений компонентами относительного перемещения элементов связей. При использовании линейной жесткости или линейного демпфирования значения указываются в виде коэффициентов матрицы размером 6x6 при помощи команды ТВ JOIN с аргументами ТВОРТ-= STIF или ТВОРТ= DAMP. Жесткость и демпфирование могут зависеть от температуры. В зависимости от используемого элемента связи для вычисления свойств элемента применяются только соответствующие виду элемента коэффициенты матрицы жесткости или демпфирования. При использовании нелинейной жесткости или нелинейного демпфирования значения указываются при помощи команды ТВ JOIN с соответствующими аргументами ТВОРТ. В случае использования нелинейной жесткости связь относительного перемещения (поворота) с усилием (моментом) указывается командой TBDATA. В любом случае, эти значения могут зависеть от температуры; для указания температур для таблицы данных применяется команда ТВТЕМР. Свойства линейных и нелинейных жесткости и демпфирования могут быть указаны независимо для каждого компонента относительного перемещения. Однако если линейная жесткость указана для компонента, не имеющего ограничений, для него же нелинейная жесткость указана быть не может. Демпфирование имеет такую же оговорку. Если элемент связи имеет более одного компонента относительного перемещения, не имеющего ограничений (например, шарнир Гука имеет два свободных компонента относительного перемещения), свойства жесткости или демпфирования могут указываться независимо, чтобы являться линейным или нелинейным для каждого из этих компонентов относительных перемещений, не имеющих ограничений. Свойства гистерезиса трения Фрикционные свойства в компонентах относительных перемещен/ш, не имеющих ограничений, влияют на общее поведение шарнира (связи). Гистерезис трения в элементах шарниров может моделироваться при помощи команды ТВ JOIN с соответствующими аргументами ТВОРТ. Связь относительного перемещения (поворота) с усилием (моментом) указывается командой TBDATA. Указываемые значения усилий должны быть положительными. Кривая зависимости относительного перемещения (или поворота) от усилия (или момента) отражается относительно оси, соответствующей перемещению, так, что свойство гистерезиса ограничивается двумя кривыми. В зоне между двумя предельными кривыми свойства считаются упругими. При достижении предельной кривой дальнейшее усилие (или момент) определяется на основе предельной кривой, до проявления упругой разгрузки. Для указания упругих свойств в зоне, находящейся между предельными кривыми, используется упругая жесткость, указываемая аргументом ТВОРТ - FRIC команды ТВ JOIN. Если это значение не указано, используется значение, имеющееся по умолчанию. Ссылочные длины и углы Начальная конфигурация элемента шарнира может быть такой, что усилия, или моменты, отличные от нуля, возможно, должны быть указаны. В подобных случаях исходные характеристики могут указываться относительно ссылочной конфигурации, такой, в которой эти усилия или моменты равны нулю. В сущности, это требует, чтобы ссылочный угол или ссылочная длина указывались. Для этого может использоваться команда SECDATA. Если ссылочный угол или ссылочная длина не указаны, значения определяются по начальной конфигурации шарнира. Ссылочная длина и ссылочный угол используются для вычисления свойств жесткости и трения. Граничные условия Для приложения граничных условий к наличным компонентам относительного перемещения используется команда DJ. Просмотр значений проводится командой DJLIST. Удаление значений проводится командой DJDELE. Сосредоточенные усилия к наличным компонентам относительного перемещения элементов связей прикладываются командой FJ. Просмотр значений проводится командой FJLIST. Удаление значений проводится командой FJDELE. Цилиндрический шарнир Геометрия и расположение узлов для данного элемента показаны на рис. 2.79.3. Элемент определяется двумя узлами. Эти два узла (I и J) исходно должны иметь идентичные координаты. 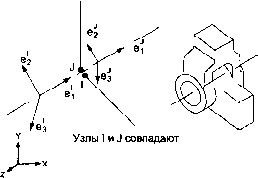 Рис. 2.79.3. Геометрия элемента МРС1В4 в форме цилиндрического шарнира Локальная декартова система координат должна быть указана для первого узла элемента I. Указание второй локальной системы координат в узле J является необязательным. Если локальная система координат в узле J не указана, она принимается идентичной локальной системе координат для узла I. Направление 1 (X) локальной системы координат обычно определяется как ось вращения узлов. Направления 2 и 3 (Y и Z) не принципиальны, но могут использоваться для указания относительного вращения между этими двумя узлами в процессе деформирования. Ориентация осей локальной систему координат должна соответствовать рис. 2.79.3. Эти локальные системы координат следуют за поворотами соответствующих узлов (если таковые имеются). Для указания осей системы координат применяется команда SECJOINT. Ограничения, приложенные в элементе цилиндрического шарнира, легко описываются при помощи двух локальных систем координат, созданных в узлах I и J. В версии 9.0 элемент не поддерживает опции рождения и смерти. Шарнир Гука Узлы I и J совпадают Рис. 2.79.4. Геометрия элемента МРС 184 в форме шарнира Гука Локальная декартова система координат должна быть указана для первого. узла элемента, I. Указание второй локальной системы координат в узле J является необязательным. Если локальная система жоординат в узле J не указана, она принимается идентичной локальной системе координат для узла I. Направление 2 (Y) локальной системы координат обычно определяется как ось относительного поворота узлов. Ориентация осей локальной системы координат должна соответствовать рис. 2.79.4. Эти локальные системы координат следуют за поворотами соответствующих узлов (если таковые имеются). Для указания осей системы координат применяется команда SECJOINT. В версии 9.0 элемент не поддерживает опции рождения и смерти. Список исходных данных элемента - I, J при KEYOPT(l) = 0,1,5, 6, 7 (стержень, балка, шарниры сферический, цилиндрический, Гука); - I, J, К for KEYOPT(l) - 3 (ползун). Степени свобод: . - для двухмерных (2D) моделей - UX, UY, при KEYOPT(l) = 3, 5 и KEYOPT(2) - 1; - для трехмерных (3D) моделей: - UX, UY, UZ при KEYOPT(l) - 0, 3, 5; - UX, UY, UZ, ROTX, ROTY, ROTZ при KEYOPT(l) - 1, 6, 7. Геометрические характеристики - нет. Свойства материала: - DAMP, ALPX (или СТЕХ или THSX), DENS для стержней и балок (КЕУОРТ(1) = 0или1); - при KEYOPT(l) = 3, 5 - нет; - при KEYOPT(l) = 6 или 7 используется аргумент JOIN команды ТВ.  1 ... 33 34 35 36 37 38 39 ... 64 |
|
| |||