
|
| |||
|
Разделы
Главная
Сапромат
Моделирование
Взаимодействие
Методы
Инновации
Индукция
Исследования
Факторизация
Частоты
Популярное
Как составляется проект слаботочных сетей?
Как защитить объект?
Слаботочные системы в проекте «Умный дом»
Какой дом надежнее: каркасный или брусовой?
Как правильно создавать слаботочные системы?
Что такое энергоэффективные дома?
|
Главная » ANSYS 1 ... 30 31 32 33 34 35 36 ... 64
2.10.73. CONTA 178- трехмерный контактный элемент типа узел с узлом Описание элемента Элемент CONTA178 моделирует контакт и скольжение между двумя узлами элементов любого типа. Элемент имеет два узла со степенями свободы в каждом узле, представляющими собой линейные перемещения в направлении осей X, Y и Z. Элемент также может использоваться в двухмерных и осесимметричных задачах с закреплением степени свободы UZ. Элемент в состоянии поддерживать сжатие в направлении нормали к элементу и кулоново трение В поперечном (касательном) направлении. Элемент может быть предварительно нагружен в направлении нормали или может иметь зазор. Имеется опция демпфирования в продольном направлении. Дополнительно могут применяться иные контактные элементы, такие как CONTAC12, COMBIN40 и CONTAC52. Исходные данные элемента Геометрия, расположение узлов и координатная система элемента показаны на рис. 2.73. Элемент определяется двумя узлами, начальной интерференцией (внедрением) или зазором (GAP), начальным состоянием элемента (START) и коэффициентами демпфирования CV1 и CV2. Ориентация направления взаимодей- 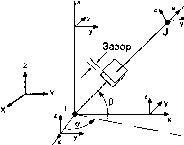 11 зак. 46 ствия определяется координатами узлов (I и J), или направлением нормали, указываемой пользователем. Контактный стык считается перпендикулярным к направлению линии I-J или указывается направлением зазора. Система координат элемента имеет начало в узле I, и ее ось X направлена в направлении узла J или в направлении зазора, указываемого пользователем. Контактный стык параллелен плоскости YZ системы координат элемента. Контактный алгоритм Могут использоваться четыре различных алгоритма расчета контактной задачи: - метод множителей Лагранжа (KEYOPT(2) = 0); - метод множителей Лагранжа в направлении нормали и метод штрафов в поперечном направлении (KEYOPT(2) = 1); - расширенный метод множителей Лагранжа (KEYOPT(2) = 2); - метод штрафов (KEYOPT(2) - 3). В последующих разделах описываются эти четыре алгоритма. Метод множителей Лагранжа Метод множителей Лагранжа не требует значений контактной жесткости FKN и FKS. Вместо них применяются контрольные параметры изменения состояния TOLN и FTOL, которые требуются комплексу ANSYS для определения сохранения состояния контакта. Величина TOLN является максимально допустимым внедрением, a FTOL - максимально допустимой силой растяжения. Примечание. Отрицательное контактное усилие имеется в закрытом контакте. Растягивающая сила (положительная) соответствует разделению контактирующих поверхностей, но не обязательно, и открытому состоянию контакта. Поведение контактного стыка может быть описано следующим образом: - если контакт на предыдущей итерации являлся открытым и текущее вычисленное значение внедрения меньше значения TOLN, такой контакт считается открытым; в противном случае состояние контакта считается закрытым и выполняется еще одна итерация; - если контакт на предыдущей итерации являлся закрытым и текущее вычисленное значение внедрения меньше значения TOLN, такой контакт считается закрытым; если сила растяжения в контакте превышает FTOL, состояние контакта меняется с закрытого на открытый и комплекс ANSYS выполняет следующую итерацию. Комплекс ANSYS имеет значения по умолчанию для величин TOLN и FTOL. При указании значений TOLN и FTOL следует учитывать изложенное ниже: - положительные значения воспринимаются как множители для значений по умолчанию; - отрицательные значения воспринимаются как абсолютные значения (заменяющие значения по умолчанию). такта в условиях изменения состояния контактных элементов. Если значения, используемые для указания допусков, слишком малые, решение потребует проведения большого числа итераций. Однако большие значения допусков повлияют на точность расчета, поскольку будут допускаться значительные внедрения или растягивающие контактные усилия. Теоретически использование прямого метода Лагранжа предусматривает нулевое проникновение при закрытом контакте и нулевое скольжение при контакте со склеиванием. Однако прямой метод множителей Лагранжа добавляет дополнительные степени свободы в модель и требует дополнительных итераций для стабилизации условий в контакте. Данное обстоятельство увеличивает время расчета и может приводить к отсутствию сходимости расчета, если большое число контактных точек переходит в процессе итерации из состояния склеивания в состояние скольжения и наоборот. Применение метода множителей Лагранжа в направлении нормали и метода штрафов в поперечной плоскости Альтернативным алгоритмом является применение метода множителей Лагранжа, использующегося в направлении нормали, и метод штрафов (касательной жесткости в поперечном направлении) в плоскости, в которой происходит трение. Данный метод применяется только при малом значении скольжения при условии контакта со склеиванием. Этот метод требует указания контрольных параметров изменения состояния TOLN и FTOL и параметра максимально допустимого упругого скольжения SLTOL. В подобном случае комплекс ANSYS также имеет значения по умолчанию, которые могут применяться в большинстве задач. Изменение значения SLTOL, имеющегося по умолчанию, может проводиться путем указания множителя (положительное значение) или абсолютной величины (отрицательное значение). Определяемая на основе допуска, текущего значения контактного усилия в направлении нормали и коэффициента трения, контактная жесткость в поперечном направлении FKS определяется автоматически. В ряде случаев значение FKS можно изменять путем указания множителя (положительное значение) или абсолютной величины (отрицательное значение). При указании величин SLTOL и FKS следует проявлять осторожность. Еслизначение SLTOL слишком большое, а значение FKS слишком малое, может наблюдаться чрезмерное упругое скольжение. Если значение SLTOL слишком малое, а значение FKS слишком большое, могут иметься трудности сходимости. Расширенный метод Лагранжа Третьим алгоритмом расчета контактных задач является расширенный метод Лагранжа, основанный на методе штрафов с расширенным контролем внедрения. Этот метод требует указания контактной жесткости в направлении нормали FKN, максимального допускаемого внедрения TOLN и максимально допустимого упругого скольжения SLTOL. Значение FKS может быть вычислено на основе максимально допустимого упругого скольжения SLTOL и текущего значения контактного усилия в направлении нормали. Комплекс ANSYS обеспечивает вы- числение значения контактной жесткости в направлении нормали FKN по умолчанию на основе модуля Юнга Е и размера прилегающих элементов. Если модуль Юнга Е не указан, он принимается равным 109. Значение по умолчанию контактной жесткости в направлении нормали FKN может быть изменено путем указания множителя (положительное значение) или абсолютной величины (отрицательное значение в единицах силы, отнесенной к единице длины). Если для TOLN указывается большое значение, расширенный метод Лагранжа работает как метод штрафов. Если значение FKN слишком малое, а значение TOLN слишком большое, может наблюдаться чрезмерное внедрение. Если значение FKN слишком большое, а значение TOLN слишком малое, могут иметься трудности сходимости. Метод штрафов Последним методом является метод штрафов. Данный метод требует указания значений контактной жесткости в нормальном и поперечном направлениях FKN и FKS. Геометрические характеристики TOLN, FTOLN и SLTOL не используются, а управление внедрением в данном методе не производится. По умолчанию значение FKN определяется подобно используемому в расширенном методе Лагранжа. Значение FKS по умолчанию определяется в виде MU*FKN. Если значения FKN и FKS указываются в виде абсолютных значений (отрицательные значения), метод работает аналогично методу штрафов, применяемому для элемента CONTAC52. Определение нормали к контакту Направление нормали к контактному стыку имеет первоочередное значение в контактных задачах. По умолчанию (KEYOPT(5) = 0 и NX,NY,NZ = 0) комплекс ANSYS вычисляет направление нормали к контакту на основе начального расположения узлов I и J, такое, что положительное перемещение (в системе координат элемента) узла J относительно узла I увеличивает зазор. Однако для любого из приведенных ниже условий направление нормали требуется указывать: - если узлы I и J имеют идентичные координаты; - если модель имеет начальное внедрение, соответствующее наложению ее фрагментов; - если исходный зазор весьма мал. Во всех указанных случаях нумерация узлов I и J существенна. Правильное направление нормали к контакту направлено от узла I к узлу J, если контакт исходно не имеет внедрения. Направление нормали может указываться посредством геометрических характеристик NX, NY, NZ (направляющие косинусы относительно осей координат глобальной декартовой системы координат) или путем применения признака KEYOPT(5). Ниже приведены варианты назначения признака KEYOPT(5): - KEYOPT(5) = 1 (2, 3) - нормаль наггравлена в соответствии со средними значениями направляющих косинусов по отношению к оси X (Y, Z) узловой системы координат для обоих узлов I и J; направляющие косинусы в узлах I и J должны быть достаточно близки; данная опция должна сопровождаться применением команд NORA и NORL, которые обеспечивают поворот системы координат узла в направлении нормали к поверхности, имеющейся в геометрической модели; - KEYOPT(5) = 4 (5,6) - нормаль направлена вдоль оси X (Y, Z) системы координат элемента, указанной командой ESYS; если данная опция используется, следует удостовериться, что система координат элемента, указанная командой ESYS, является декартовой. Состояние контакта Начальный зазор определяет размер зазора (положительное значение) или внедрение (отрицательное значение). Если KEYOPT(4) = 0 и по умолчанию величина зазора может быть автоматически рассчитана на основе геометрической характеристики GAP и координат узлов (используется проекция вектора, направленного от узла I в направлении узла J на нормаль), то есть размер зазора определяется путем сложения геометрического расстояния и значения GAP. При KEYOPT(4) = 1 размер начального зазора основан на значений геометрической характеристики GAP (координаты узлов игнорируются). По умолчанию признак KEYOPT(9) имеет значение 0, что означает, что размер начального зазора прикладывается в виде нагрузки на первом шаге нагрузки. Для плавного приложения начального зазора (например, в модели с начальным внедрением) применяется признак KEYOPT(9) = 1. Кроме того, следует вызывать команду КВС,0 и на первом шаге нагрузки не прикладывать никаких внешних нагрузок. Взаимосвязь сил и перемещений для контактного элемента может быть разделена по нормальному и поперечному направлениям. Применительно к направлению нормали если сила, действующая в направлении нормали (FN), отрицательна, контакт является закрытым (STAT = 3 или 2). Применительно к поперечному направлению при FN < 0 и абсолютном значении поперечной силы (FS), меньшем, чем pFN, контакт является склеенным (STAT = 3). При FN < 0 и FS = pFN имеется скольжение (STAT = 2). Если FN становится положительной, контакт нарушается (STAT = 1) и никаких сил через него не передается (FN - О, FS = 0). Начальные условия для первого промежуточного шага могут быть определены параметром START. Начальное состояние элемента (START) используется для определения предыдущего условия в контактном стыке в начале первого промежуточного шага. Данное значение Заменяет условия, указанные для контактного стыка, и может быть полезно для прогнозирования окончательного вида контактного взаимодействия и сокращения числа итераций, требующихся для сходимости. Однако при определении нереального Значения START сходимость решения может ухудшаться. Если START = 0.0 или пробелу, начальное состояние элемента определяется или по значению GAP, или в соответствии с признаком KEYOPT(4). Если START = 3.0, контакт исходно закрыт и скольжения нет (р * 0) или имеется (при р = 0.0). Если START = 2.0, контакт исходно закрыт и скольжение имеется. Если START = 1.0, контакт исходно открыт. Единственное используемое свойство материала - коэффициент трения р (MU). Для поверхностей, не имеющих трения, должно указываться нулевое значение. Температуры могут указываться в узлах элемента и используются только для определения свойств материала. Коэффициент трения р определяется по среднему значению из двух температур. По умолчанию температура в узле I Т(1) равна TUNIF. По умолчанию температура в узле J равна Т(1). Для задач, учитывающих трение, полезно (и фактически иногда требуется при значении коэффициента трения р > 0.2) использование команды NROPT, UNSYM для задач, в которых перемещения в нормальном и поперечном направлениях жестко связаны. Малая связь Признак KEYOPT(3) может быть использован для введения малой связи через контактный стык, полезной для предотвращения перемещений тел как жесткого целого в статических задачах. Жесткость малой упругой связи вычисляется как произведение жесткости в нормальном направлении KN на множитель при положительном значении геометрической характеристики REDFACT (который по умолчанию равен Ю-6). Жесткость малой связи может быть изменена путем указания отрицательного значения REDFACT. Указание признака KEYOPT(3) = 1 добавляет жесткость малой связи только в нормальном направлении для открытого контакта. Указание признака KEYOPT(3) = 2 добавляет жесткость малой связи в нормальном направлении для открытого контакта и в поперечной плоскости для контакта, являющегося открытым или свободным от трения. Аналогично применяемому для элемента CONTAC52 малая связь влияет на глобальную матрицу жесткости, при значении признака KEYOPT(3) = 1 или 2 предотвращая появление сингулярностей в ходе процесса собственно расчета. При указании KEYOPT(3) = 3 или 4 малая связь влияет на матрицу глобальной жесткости и внутренние узловые усилия, которая поддерживает два разделенных узла. Примечание. Малая связь никогда не должна использоваться совместно с контактом без разделения или контактом со склеиванием, определенными путем указания признака KEYOPT(IO). Свойства контакта Признак KEYOPT(IO) используется для определения следующих различных свойств контактных поверхностей: - KEYOPT(IO) = 0 - моделируется стандартный односторонний контакт; это значит, что при разделении поверхностей нормальное давление равно нулю; - KEYOPT(IO) = 1 - моделируется грубый контакт с трением, в котором отсутствует скольжение; этот случай соответствует бесконечному коэффициенту трения и игнорированию свойства материала MU; - KEYOPT(IO) = 2 - моделируется контакт без разделения, в котором два узла, разделенные зазором, связываются (хотя скольжение допускается) для последующего сохранения ранее найденного контакта; - KEYOPT(IO) = 3 - моделируется контакт со склеиванием, в котором два узла, разделенные зазором, склеиваются и имеют равные перемещения во всех направлениях, если ранее контакт был найден; - KEYOPT(IO) = 4 - моделируется контакт без разделения, в котором два узла, разделенные зазором, связываются (хотя скольжение допускается) в ходе расчета; - KEYOPT(IO) = 5 - моделируется контакт со склеиванием, в котором два узла, разделенные зазором, соединяются во всех направлениях в ходе расчета; - KEYOPT(IO) = 6 - моделируется контакт со склеиванием, в котором два контактирующих узла, исходно находящиеся в состоянии закрытого контакта, остаются в состоянии закрытого контакта, и два узла, разделенные зазором, исходно находящиеся в состоянии открытого контакта, остаются в состоянии открытого контакта в ходе расчета. Цилиндрический зазор Опция цилиндрического зазора (KEYOPT(l) = 1) полезна для задач, в которых нормали к окончательному контакту не фиксируются в ходе расчета, например в задачах взаимодействия концентрических труб. При использовании данной опции указываются геометрические характеристики NX, NY и NZ, являющиеся направляющими косинусами оси цилиндра в глобальной декартовой системе координат. Направление нормали лежит в поперечном сечении, перпендикулярном оси цилиндра. Программа определяет проекцию относительного расстояния XJ-Х1 между текущим расположением узла I и текущим расположением узла J на плоскость поперечного сечения. По умолчанию набор геометрических характеристик NX, NY и NZ равен (0,0,1), что соответствует цилиндрическому зазору в двухмерной задаче. При действии опции цилиндрического зазора признаки KEYOPT(4) и KEYOPT(5) игнорируются, а порядок узлов может быть произвольным. Значение геометрической характеристики GAP не может превышать значения начального зазора, а нулевое ее значение не допускается. - Положительное значение GAP соответствует случаю, когда цилиндр с малым наружным диаметром вставлен в цилиндр с большим внутренним диаметром; значение GAP равно разнице радиусов цилиндров (RJ-RI) и представляет собой максимально допустимое расстояние, проецируемое на плоскость поперечного сечения; контактное конструктивное условие может быть записано в виде XJ - XI < GAP. - Отрицательное значение GAP соответствует внешнему контакту двух цилиндров; GAP равен сумме двух радиусов (RJ + RI) и представляет собой минимально допустимое расстояние, проецируемое на плоскость поперечного сечения; контактное конструктивное условие может быть записано в виде XJ-XI>GAP. Демпфирование Возможность демпфирования используется только в расчетах собственных частот и в переходных процессах. По умолчанию демпфирование в элементе не учитывается. Демпфирование действует в направлении нормали при закрытом контакте. Единицей измерения демпфирования является сила* время/длина. Для двухмерного осесимметричного расчета коэффициент должен учитывать все 360° дуги окружности. Сила демпфирования вычисляется в виде Fx = - Cv*dUx/dt, где Cv - коэффициент демпфирования, определяемый как Cv = Cvl + Cv2*V. В данном случае V - скорость, определенная на предыдущем промежуточном шаге. Второй коэффициент демпфирования (Су2) применяется при учете эффектов нелинейного демпфирования. Контроль состояния контакта По умолчанию комплекс ANSYS не выводит состояние контакта и значение контактной жесткости в каждом отдельном элементе. Для вывода подобной информации, которая может способствовать выявлению причин проблем сходимости, применяется признак KEYOPT(12) = 1. Список исходных данных элемента Узлы - I, J. Степени свобод - UX, UY, UZ Геометрические характеристики: - FKN - жесткость в направлении нормали; - GAP - начальный размер зазора; - START - начальное состояние контакта; - FKS - жесткость в поперечном направлении; - REDFACT KN/KS - понижающий коэффициент; - NX - компонент зазора в направлении -X; - NY - компонент зазора в направлении -Y; - NZ - компонент зазора в направлении -Z; - TOLN - допуск внедрения; - FTOL - максимальное усилие в контакте; - SLTOL - максимальное упругое скольжение; - CV1 - коэффициент демпфирования; - CV2 - нелинейный коэффициент демпфирования. Объемные нагрузки: - температуры T(I), TYJ). Специальные возможности: - нелинейный тип зазора. KEYOPT(l) - признак типа зазора: -О - ненаправленный зазор; - 1 - цилиндрический зазор. KEYOPT(2) - признак контактного алгоритма: -О - метод множителей Лагранжа; - 1 - метод множителей Лагранжа в направлении нормали к контакту и метод штрафов в поперечном направлении; - 2 - расширенный метод Лагранжа; - 3 - метод штрафов. KEYOPT(3) - признак использования слабой связи: - О - не используется; - 1 - действует через открытый контакт (влияет только на матрицу жесткости); - 2 - действует через открытый контакт и поверхность с трением (влияет только на матрицу жесткости); - 3 - действует через открытый контакт (влияет на матрицу жесткости и внутренние силы); - 4 - действует через открытый контакт и поверхность с трением (влияет на матрицу.жесткости и внутренние силы). KEYOPT(4) - признак размера зазора: -О - размер зазора основан на геометрической характеристике GAP и на исходных координатах узлов; - 1 - размер зазора основан на геометрической характеристике GAP (исходные координаты узлов игнорируются). KEYOPT(5) - признак типа вычисления нормали в контакте: - О - на основе координат узлов и геометрических характеристик NX, NY, NZ; - 1 - в направлении оси X узловой системы координат (осредненной для двух контактных узлов); - 2 - в направлении оси Y узловой системы координат (осредненной для двух контактных узлов); - 3 - в направлении оси Z узловой системы координат (осредненной для двух контактных узлов); - 4 - в направлении оси X системы координат элемента (команда ESYS); - 5 - в направлении оси Y системы координат элемента (команда ESYS); - 6 - в направлении оси Z системы координат элемента (команда ESYS). KEYOPT(7) - признак контроля приращения шага по времени: -О - без контроля; - 1 - производится прогнозирование шага по времени для обеспечения рационального приращения шага; выполняется только при действии команды SOLCONTROL,ON,ON; - 2 - производится прогнозирование шага по времени для обеспечения минимального приращения шага по времени при изменении состояния контакта в элементе; подразумевает деление шага пополам; выполняется только при действии команды SOLCONTROL,ON,ON. KEYOPT(9) - признак приложения зазора в виде шага по времени: - О - начальный зазор прикладывается целиком; - 1 - начальный зазор прикладывается плавно на первом шаге нагрузки. KEYOPT(IO) - признак свойств контактной поверхности:
KEYOPT(12) - признак состояния контакта: - О - состояние контакта не выводится; - 1 - проводятся контроль и вывод состояния контакта и контактной жесткости. Расчетные данные элемента Расчетная информация, связанная с элементом, разделена на два вида: - узловые объекты, такие как узловые перемещения, включены в полное узловое решение; - дополнительные элементные объекты, перечисленные в табл. 2.73.
1 ... 30 31 32 33 34 35 36 ... 64 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| |||